
Junyong Park
KAIST, Daejeon, Republic of Korea ·
jyp0802@kaist.ac.kr
I am a 6th-year Ph.D. student in the School of Computing at KAIST.
I'm part of NMAIL doing research on motion analysis and machine learning for wearable applications.
I am interested in creating innovative yet user-friendly systems that help people connect better.
I'm part of NMAIL doing research on motion analysis and machine learning for wearable applications.
I am interested in creating innovative yet user-friendly systems that help people connect better.
Publications
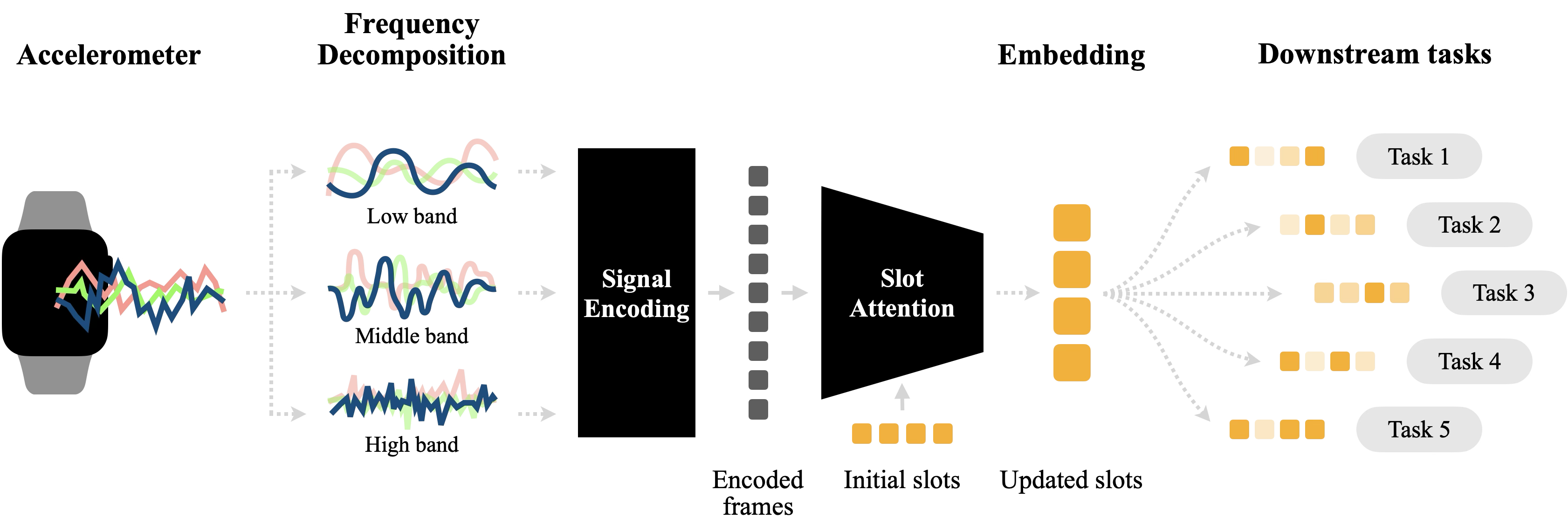
SlotFM: A Motion Foundation Model with Slot Attention for Diverse Downstream Tasks
Junyong Park, Oron Levy, Rebecca Adaimi, Asaf Liberman, Gierad Laput, Abdelkareem Bedri
Preprint
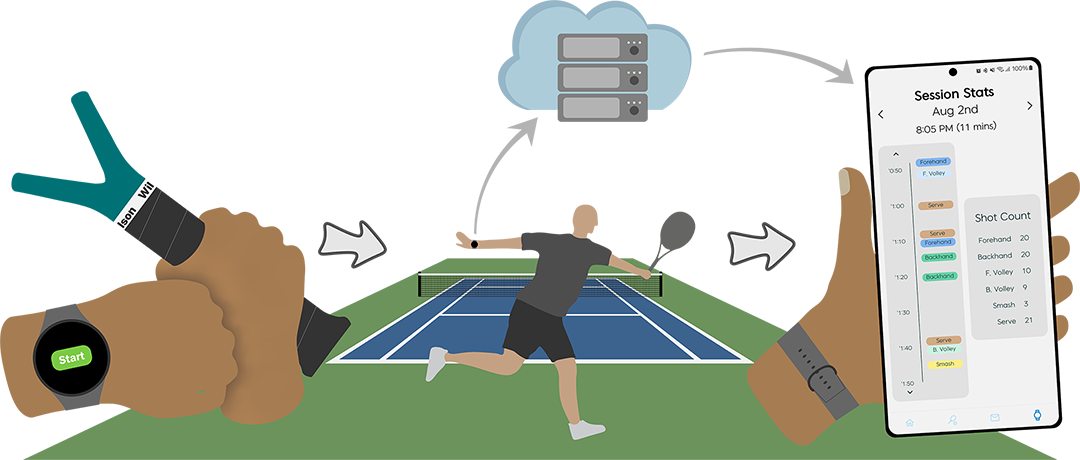
Silent Impact: Tracking Tennis Shots from the Passive Arm
Junyong Park, Saelyne Yang, Sungho Jo
ACM Symposium on User Interface Software and Technology (UIST) 2024
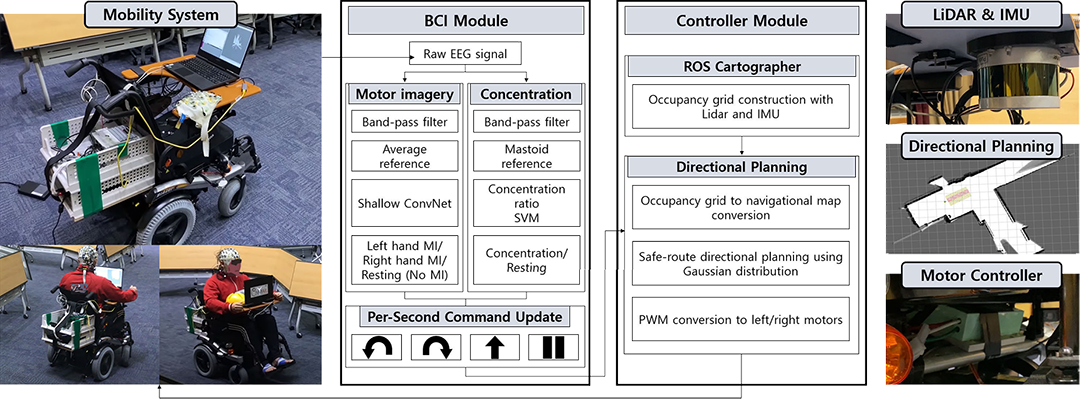
Asynchronous Motor Imagery BCI and LiDAR-based Shared Control System for Intuitive Wheelchair Navigation
Jin Woo Choi, Junyong Park, Sejoon Huh, Sungho Jo
IEEE Sensors Journal 2023
[PDF]
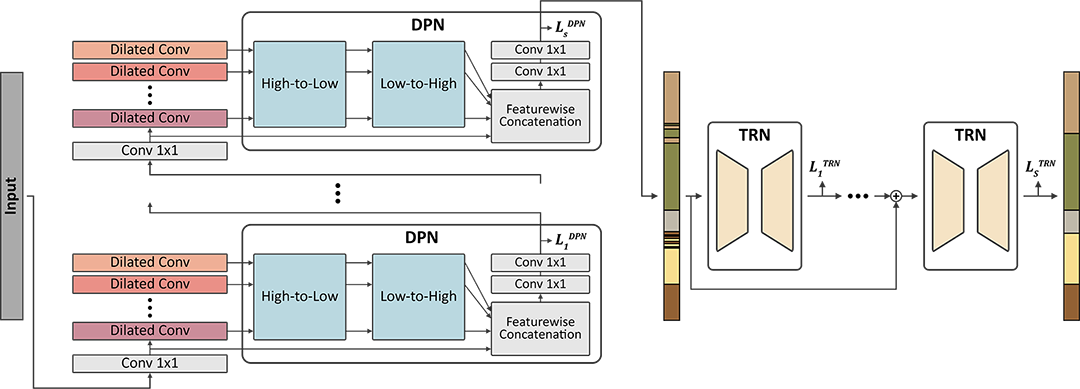
Maximization and restoration: Action segmentation through dilation passing and temporal reconstruction
Junyong Park, Daekyum Kim, Sejoon Huh, Sungho Jo
Pattern Recognition 2022
[PDF]
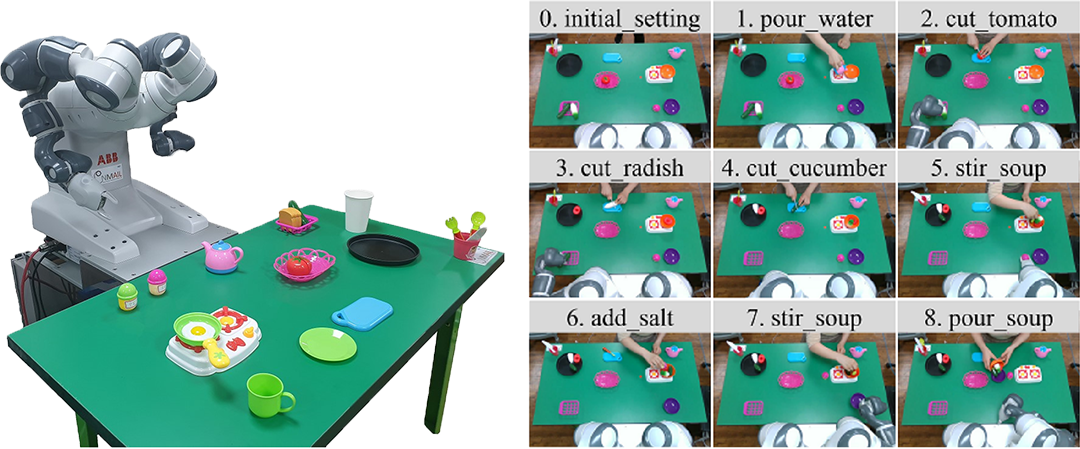
A Robot Capable of Proactive Assistance through Handovers for Sequential Tasks
Nayoung Oh, Junyong Park, Ji Ho Kwak, Sungho Jo
International Conference on Ubiquitous Robots (UR) 2021
[PDF]
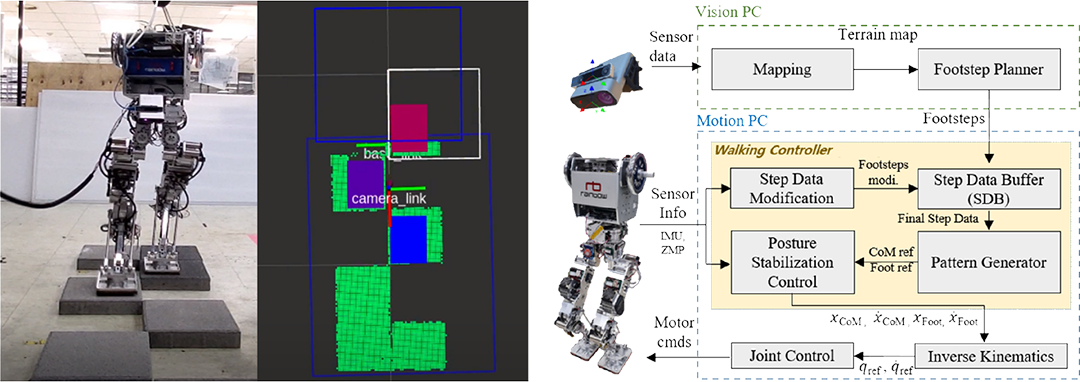
Dynamic Humanoid Locomotion Over Rough Terrain With Streamlined Perception-Control Pipeline
Moonyoung Lee, Youngsun Kwon, Sebin Lee, JongHun Choe, Junyong Park, Hyobin Jeong, Yujin Heo, Min-su Kim, Jo
Sungho, Sung-Eui Yoon, Jun-Ho Oh
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021
[PDF]
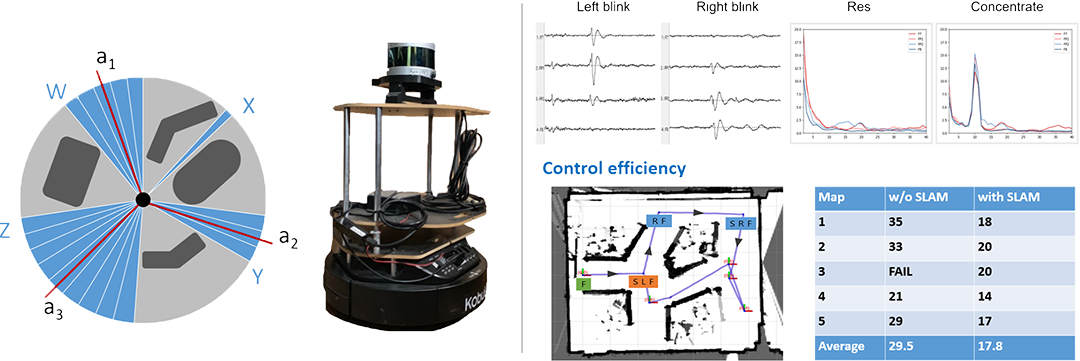
A SLAM Integrated Hybrid Brain-Computer Interface for Accurate and Concise Control
Junyong Park, Jin Woo Choi, Sungho Jo
International Winter Conference on Brain-Computer Interface 2019
[PDF]
Education
KAIST
Ph.D. in School of Computing
Advisor: Sungho Jo
GPA: 4.02/4.3
Sep. 2020
-
Present
KAIST
M.S. in School of Computing
Advisor: Sungho Jo
Thesis: Feature Removal of Movable Objects in Visual SLAM
Sep. 2018
-
Feb. 2020
KAIST
B.S. in School of Computing
Graduated with Honors (Cum Laude)
Sep. 2014
-
Aug. 2018
Experiences
Apple
Research Intern
Mentor: Abdelkareem Bedri
Mar. 2025
-
Sep. 2025
Apps Developed

purray
Share prayer requests with your friends
Developer: Junyong